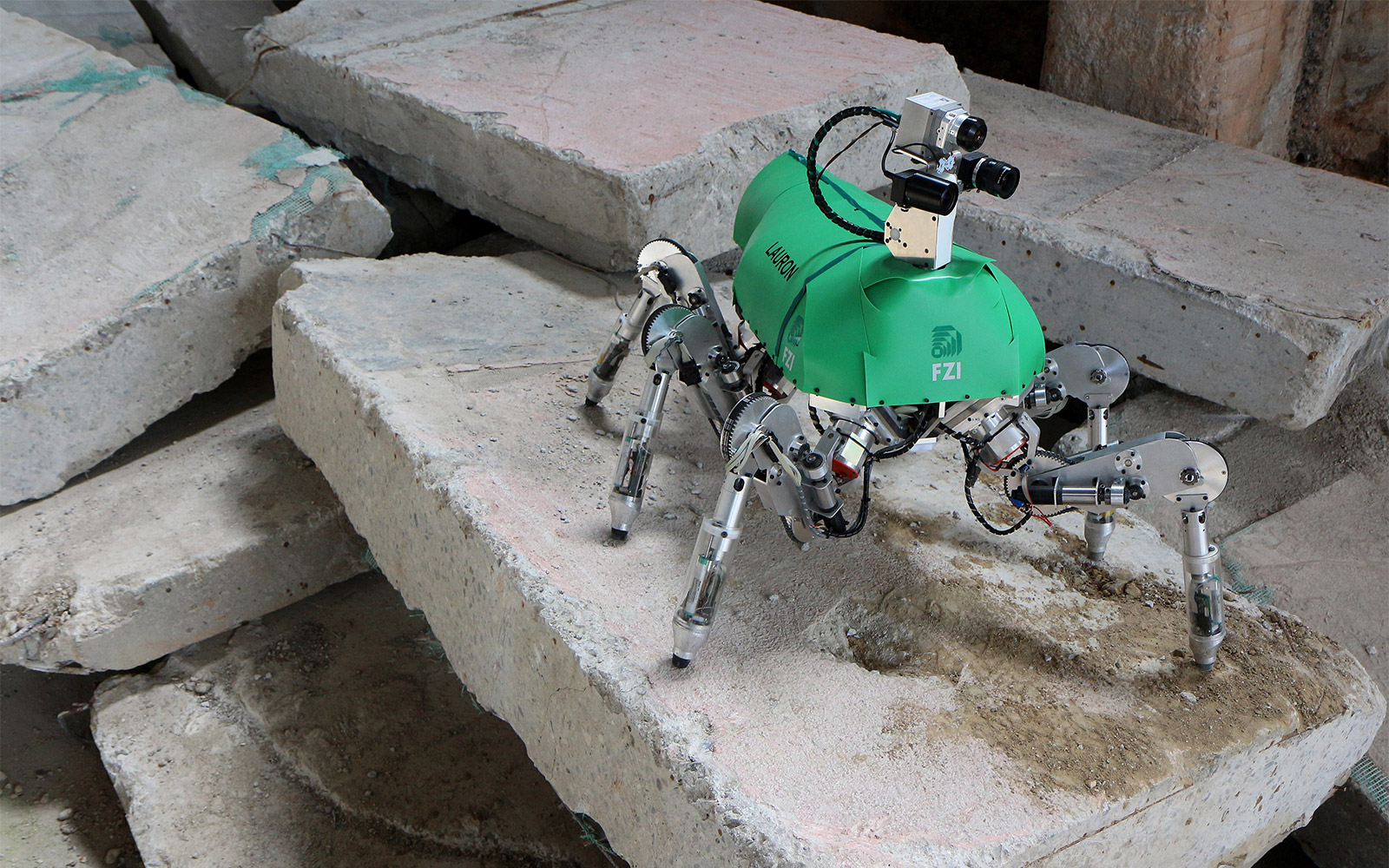



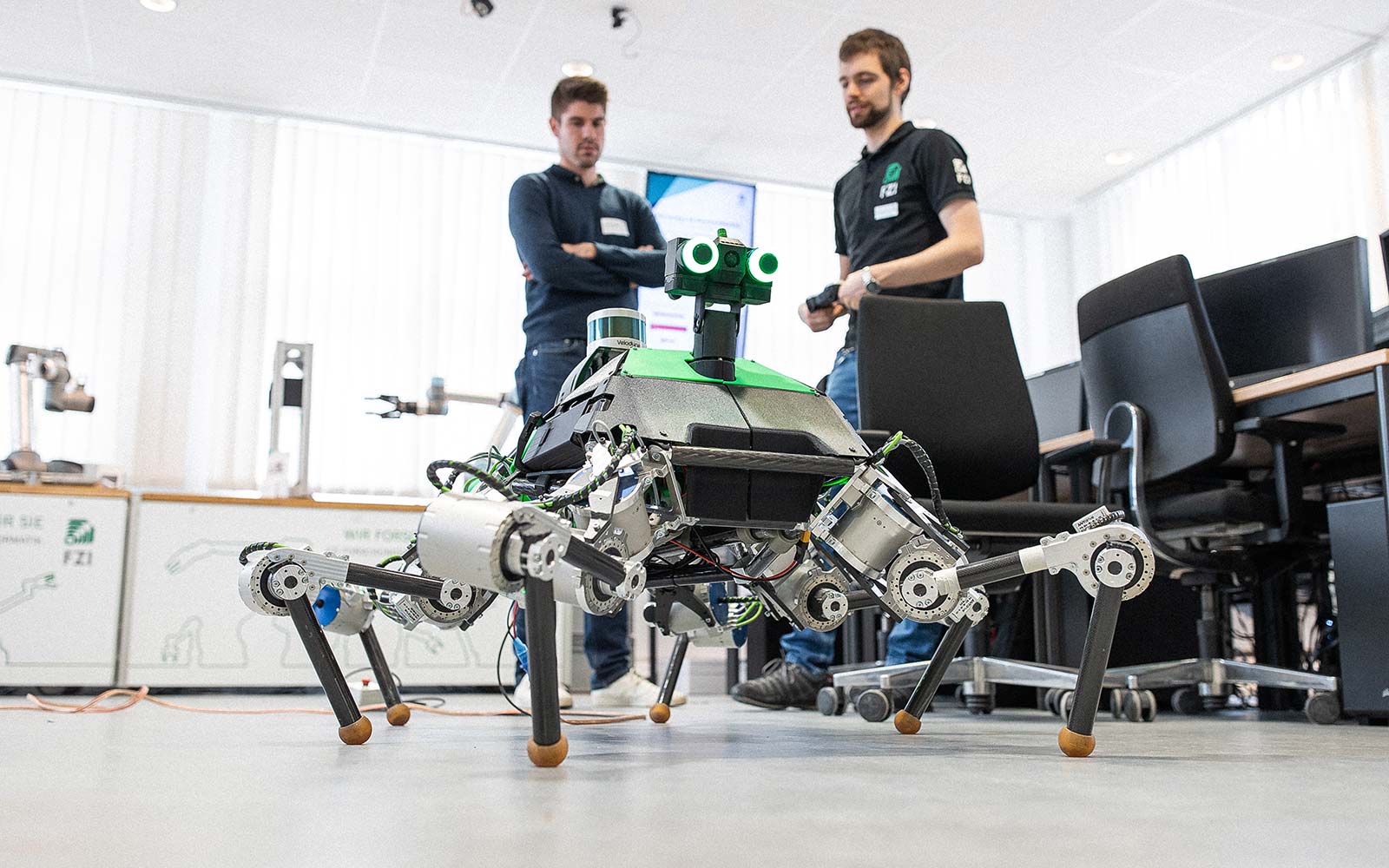
Since the early nineties, the FZI Research Center for Information Technology has been working on the development of intelligent, multi-legged walking robots. What started as a wooden prototype has evolved into the highly complex autonomous walking robots LAURON V and VI. The name LAURON (German abbreviation of LAUfender ROboter Neuronal gesteuert, signifying “walking robot with neural control”) originates from the first generation, which, in contrast to the current generation, was still controlled by neural networks. The six-legged kinematics allows for reproducing biologically inspired, insect-like walking approaches. They are characterized by robust walking capabilities for demanding inspection tasks. In 2024, the sixth generation was presented to the public.
FZI in-house construction without third-party specifications
Sensor and actuator
equipment customized for
use and application
ROS 2 as the basis for flexible control and application
Based on the model of a
stick insect
.
Static stability and mobility even on difficult terrain
Robust gripping and mastering of steep inclines
Option for various controllers, fitting to the surroundings
Specific equipment for individual inspection tasks
As an independent research institution, the FZI Research Center for Information Technology supports you in finding a solution for your specific requirements. We offer
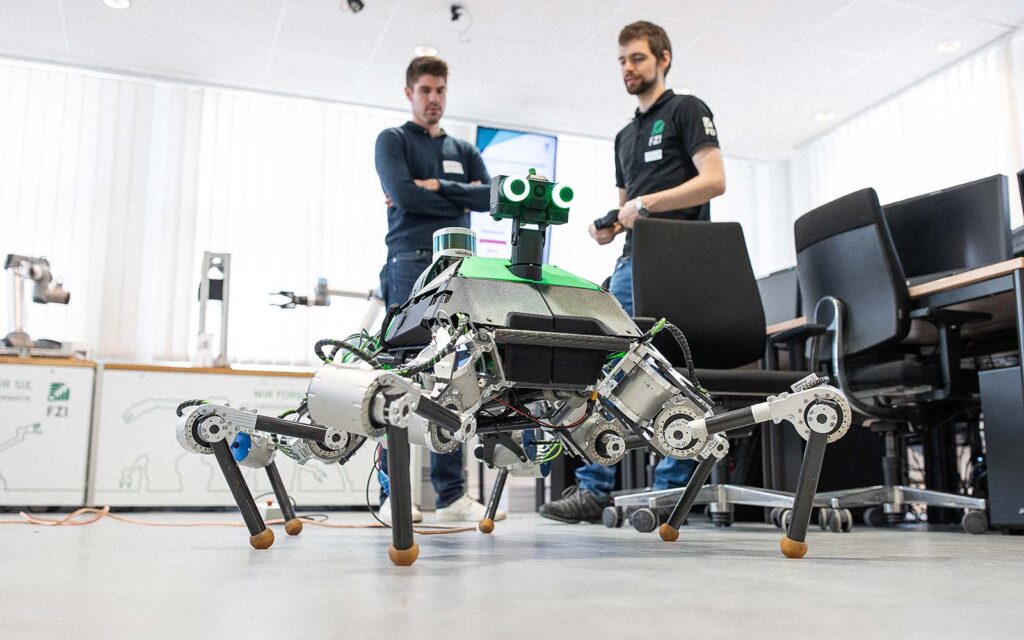
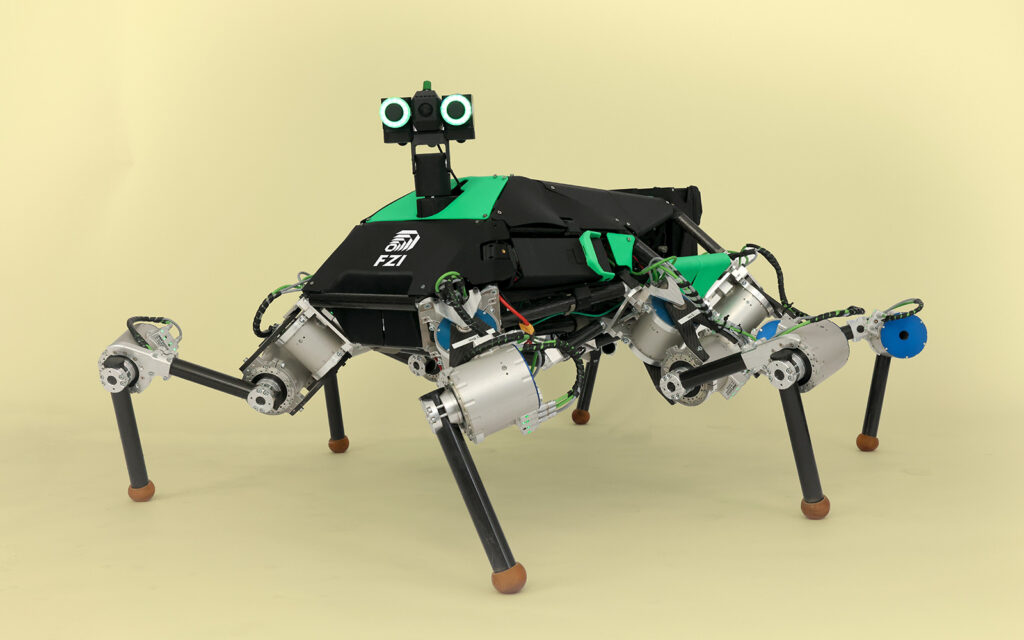
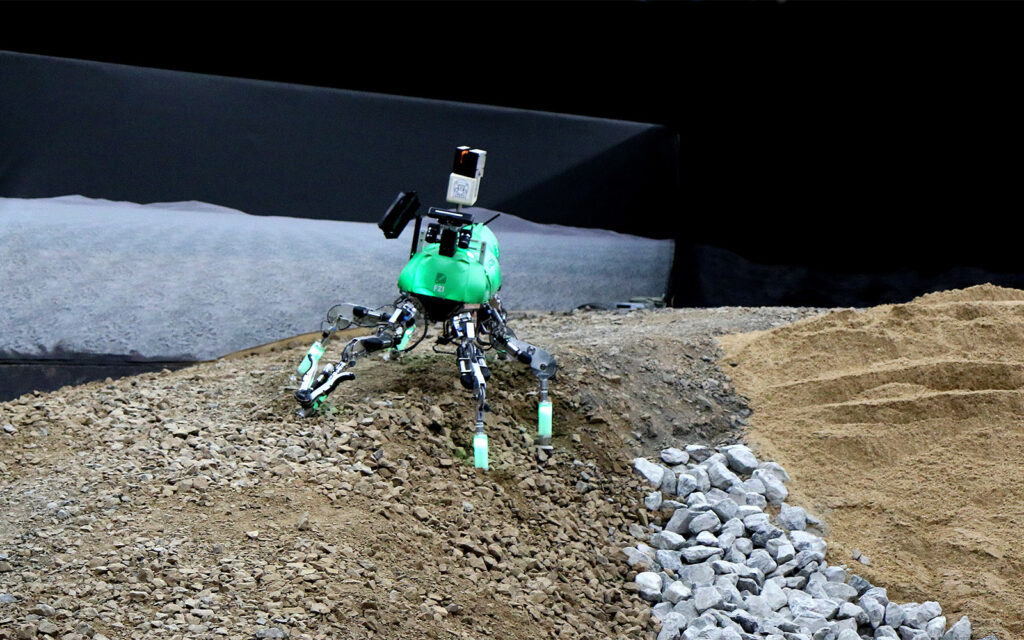
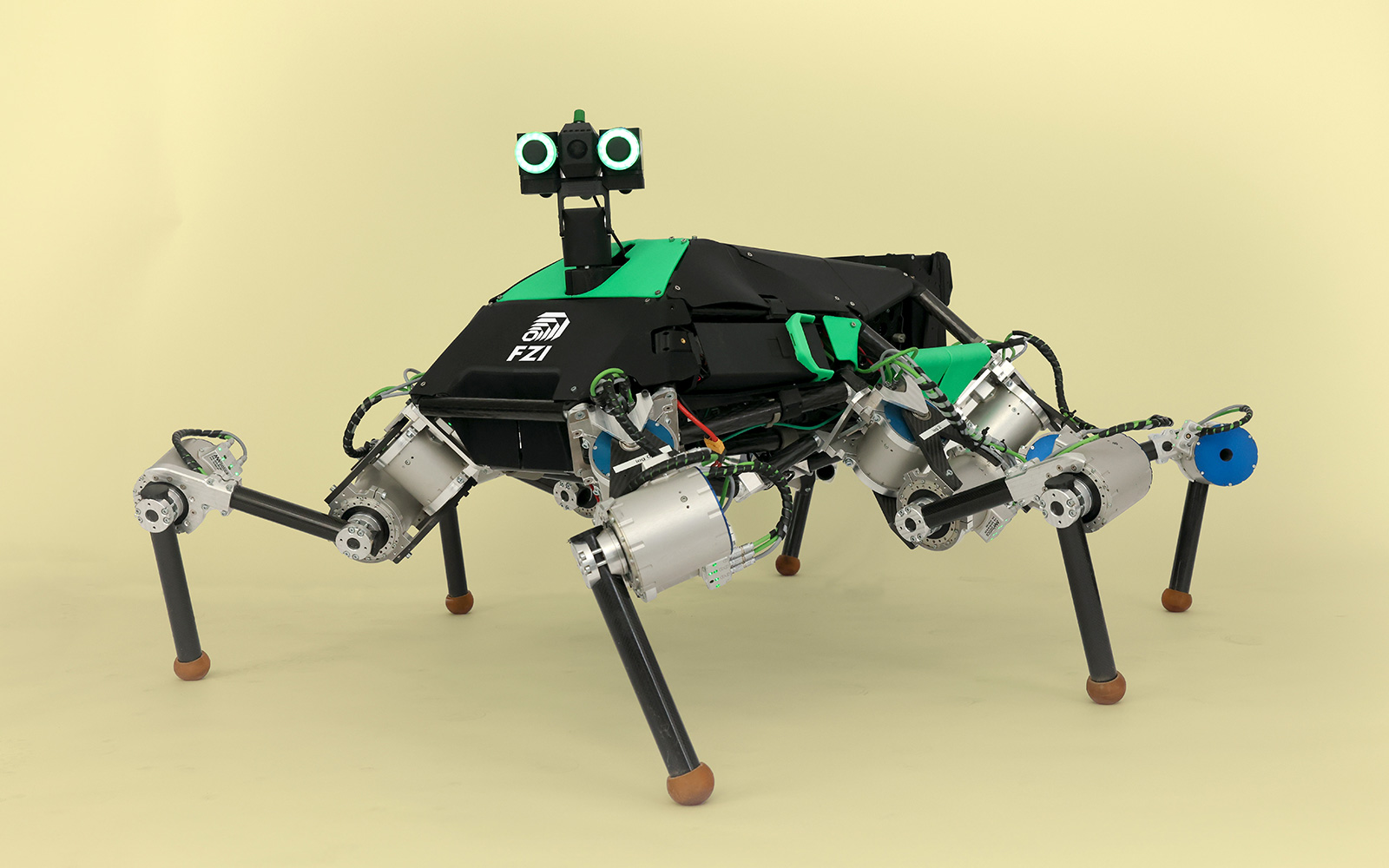
LAURON VI will be presented at the CLAWAR conference 2024. It utilizes specific torque-controlled motors equipped with a flexible spring, absorbing hard impacts and making the robot more robust. A full-body control approach ensures the robot’s stability even during complex maneuvers in difficult terrain. The new LAURON generation thus creates an adaptive inspection platform for demanding applications.
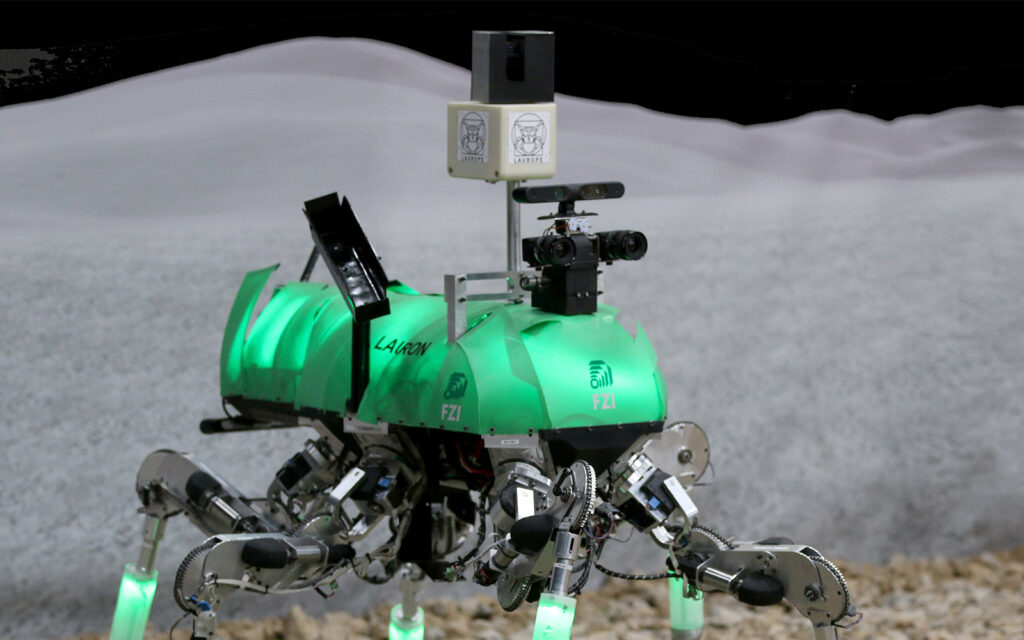
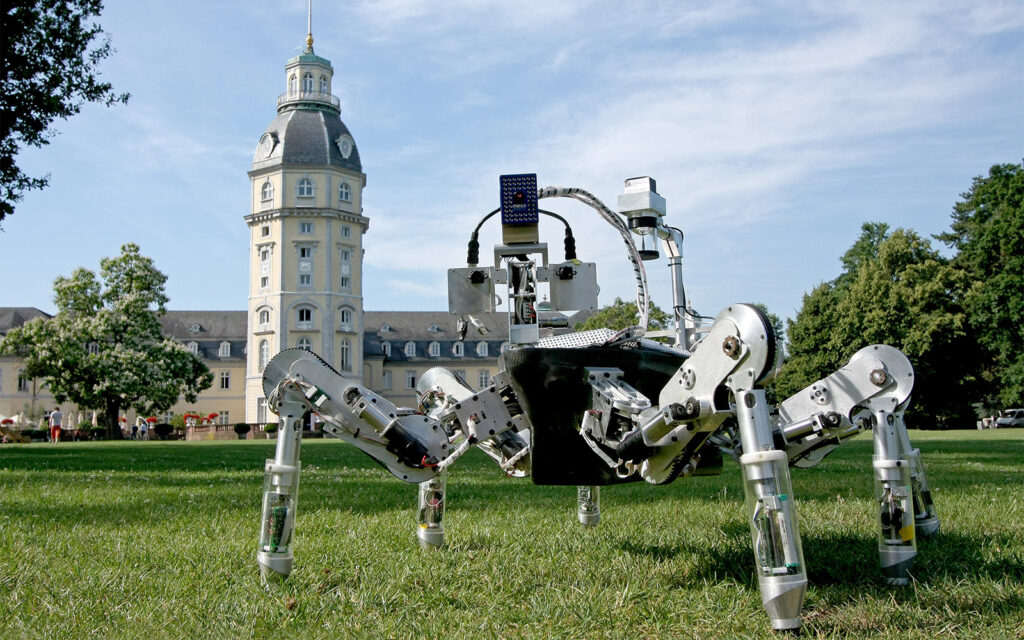
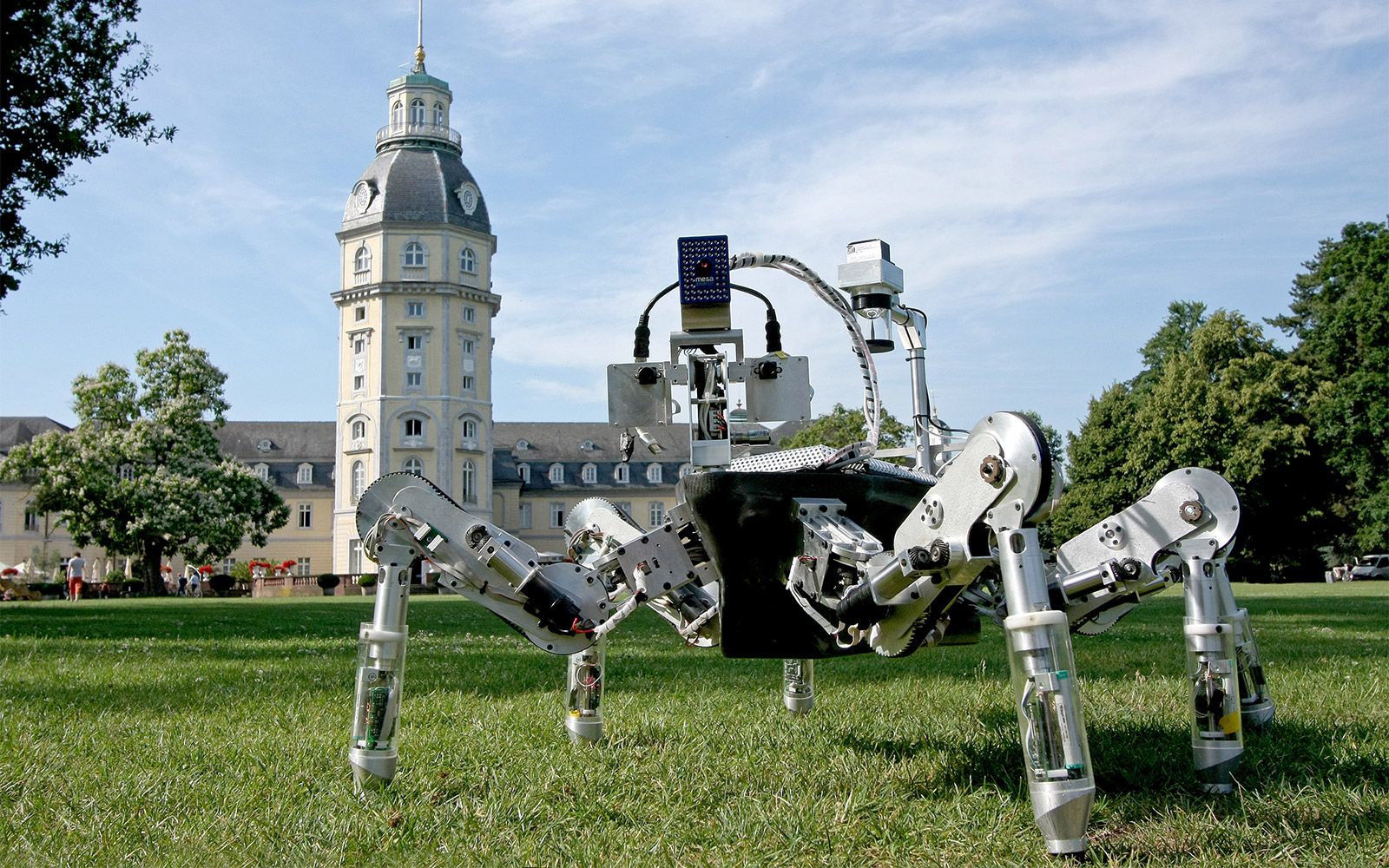
LAURON V was presented at the IEEE robotics conference ICRA in 2013. The fifth generation is characterized by an additional rotational joint. The kinematics is aligned closer to the biological model and ensures safe locomotion. LAURON V is applicable for demanding inspection, search, and rescue tasks. His capabilities were put to the test at the DLR SpaceBot Cup in 2012. The robot is located in the FZI House of Living Labs and is currently employed for research purposes.
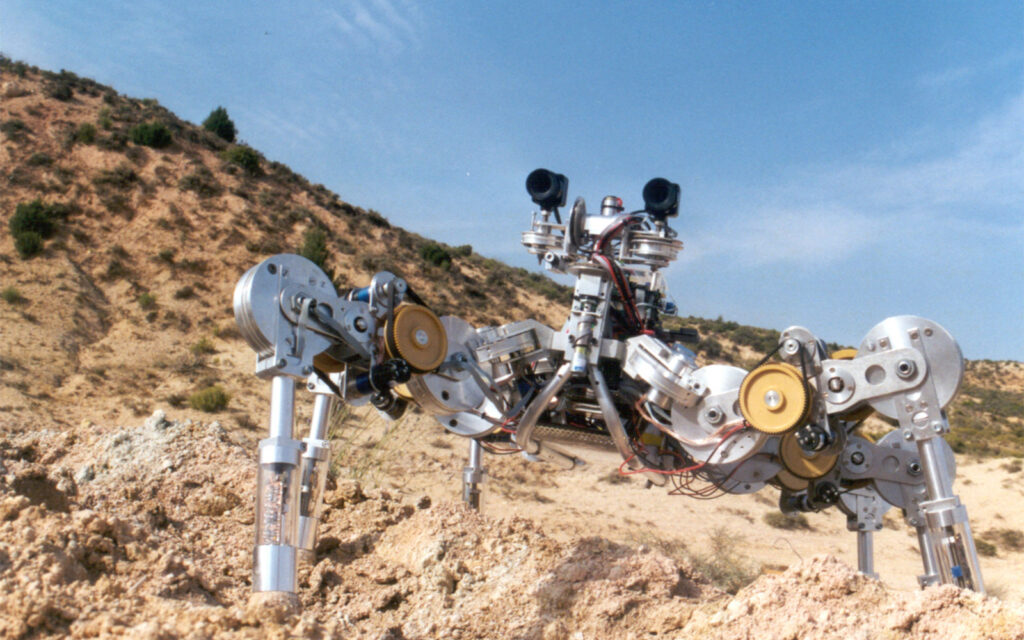
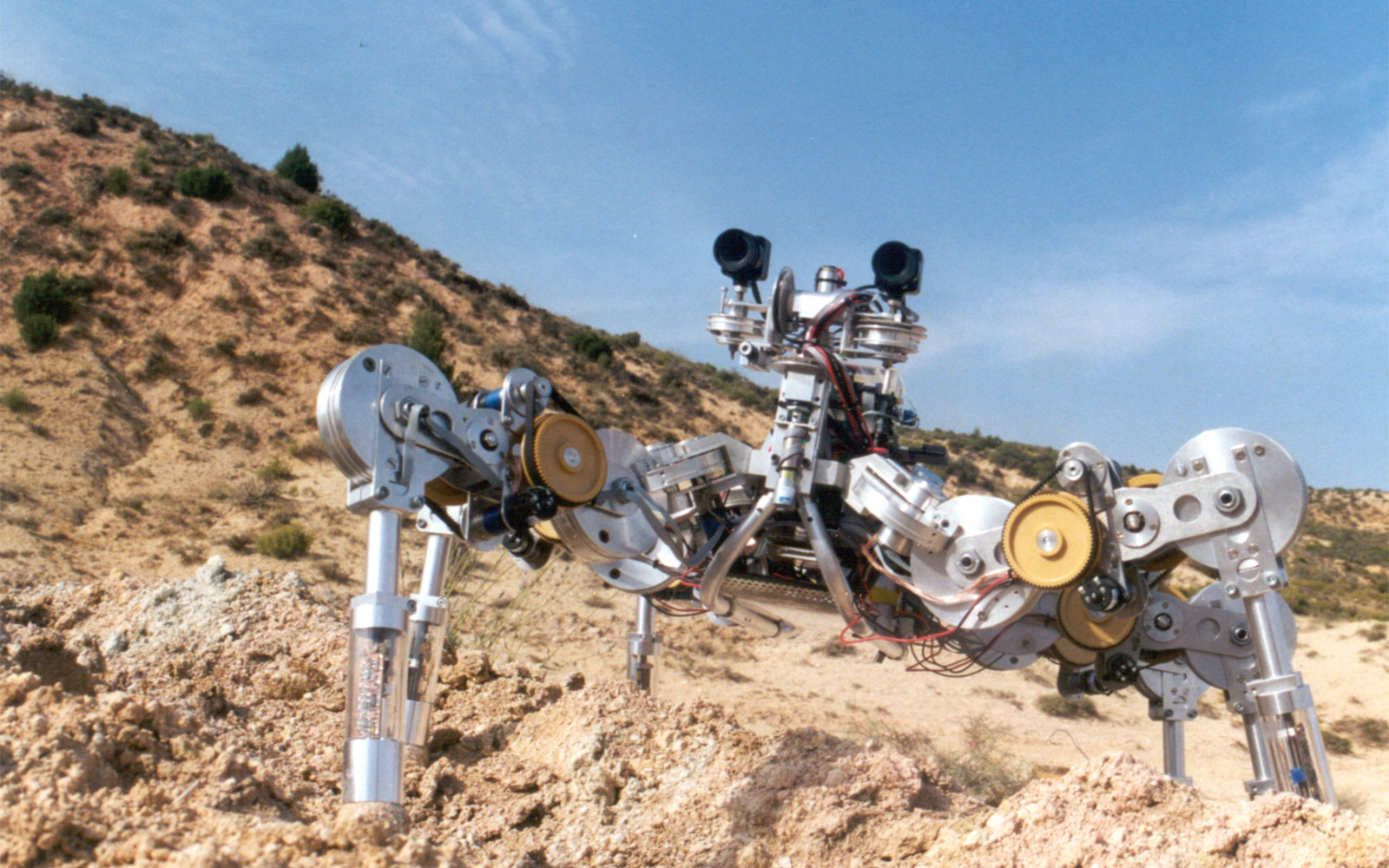
LAURON IV was developed in 2004 and is characterized by an improved robustness compared to its predecessor model. In its legs, toothed belts replace the formerly used cable pulls. The robot’s head has two degrees of freedom. Its central body is made of carbon-fiber-reinforced plastic. Two embedded PCs and unique motor control electronics are used for control. Three specimens of generation IV were put into operation. They are currently located in various university institutes and museums in Europe.
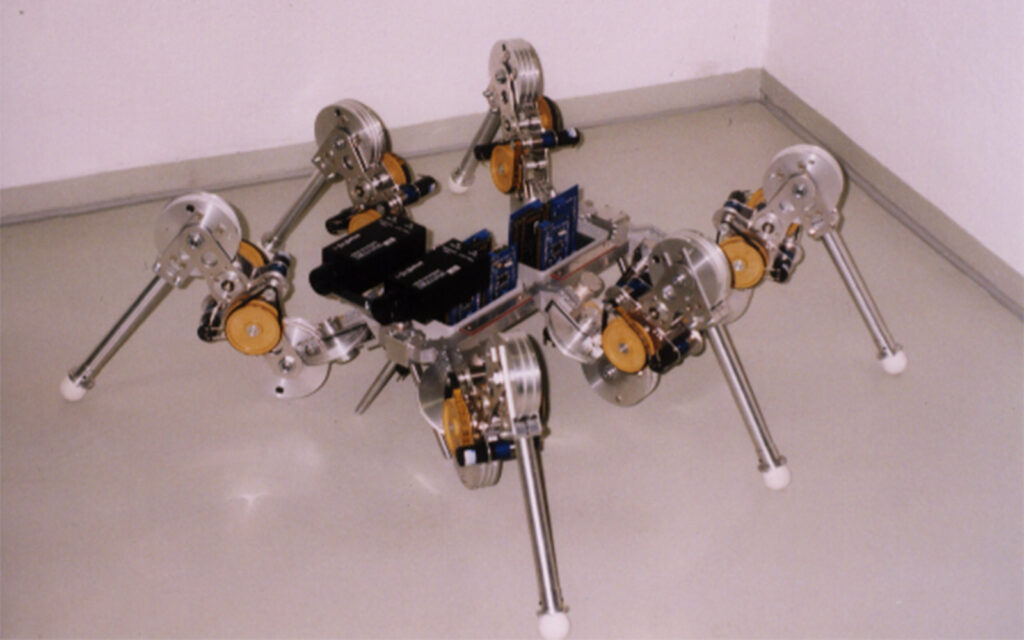
LAURON III dates back to 1999. Here, a modular and reactive robot control system replaced the neural networks of previous generations. Apart from walking, this robot version was also used to investigate localization, navigation, and environmental modeling. Eight robot systems of this generation were built and sold. One is still located in the FZI House of Living Labs, and another in the Technoseum in Mannheim.
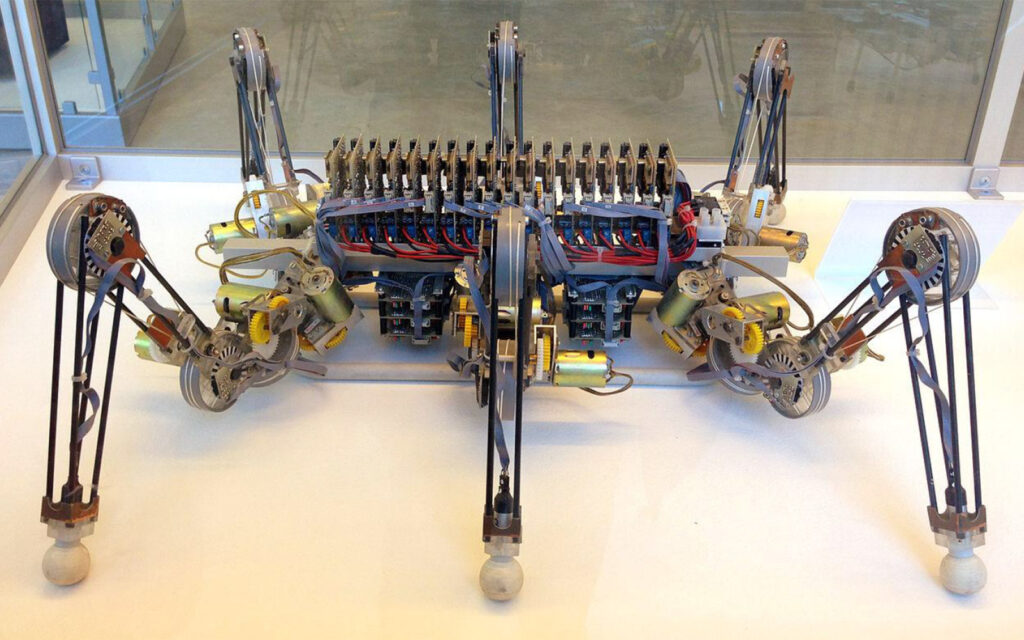
LAURON II dates back to 1994 and was characterized by a revised design and additional foot force and tilt sensors. Heavy legs made of aluminum increased the robot’s weight to 16 kilograms. LAURON II served as a test platform for control strategies and machine learning.
Lauron I was presented to the public at CEBIT in 1994. Its central body was made of aluminum, and its legs were fiber-reinforced plastic. It weighed around 11 kilograms. The robot was controlled by neural networks. The stick insect served as biological inspiration. Today, LAURON I is owned by the Deutsches Museum in Munich.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}