Service robot for human-centered environments
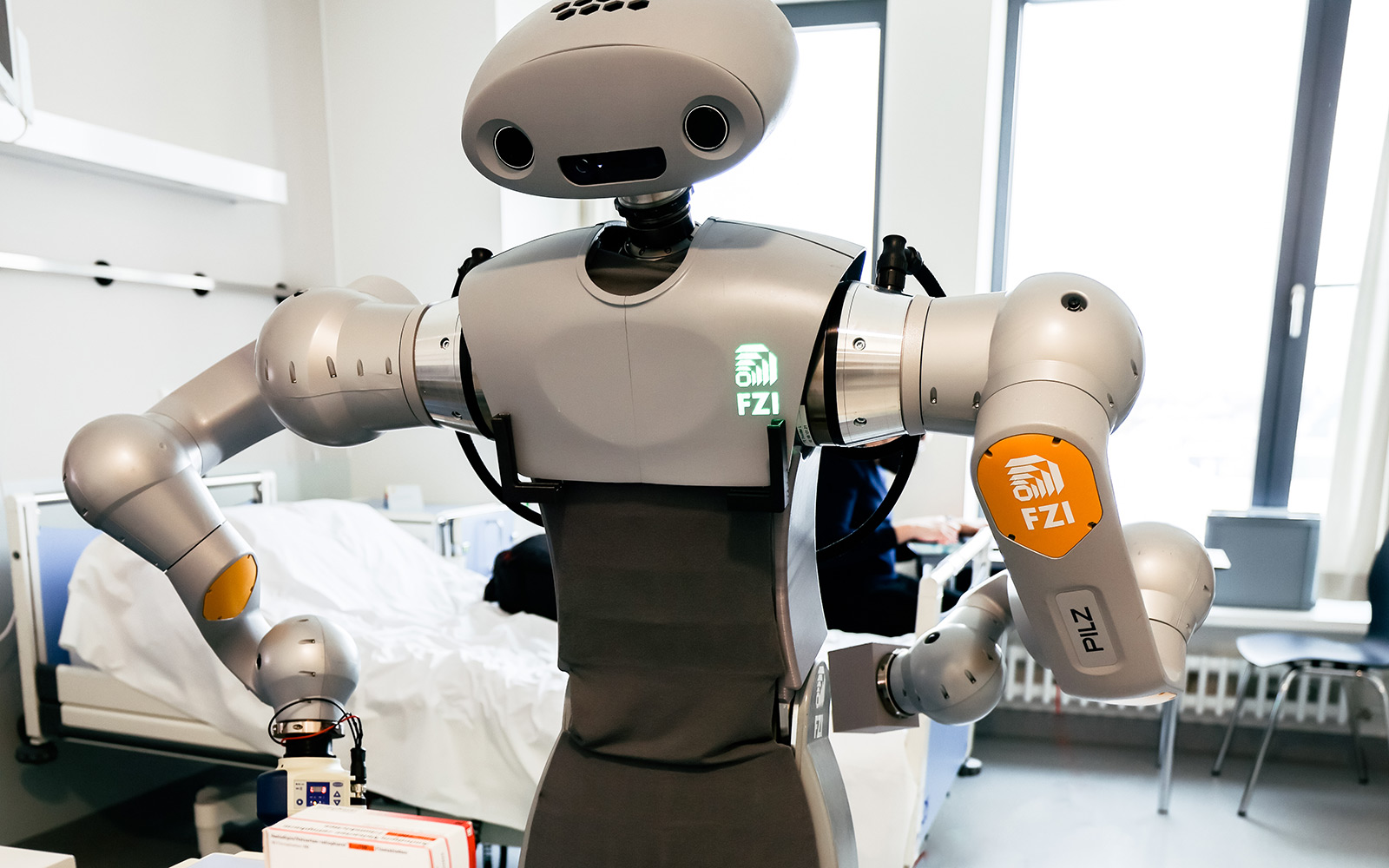
HoLLiE
HoLLiE (“House of Living Labs intelligent Escort”) is a modular service robot with two arms, a mobile platform, and many sensors. By combining robust, industry-oriented components with flexible software systems for environment detection and robot control, HoLLiE can quickly and reliably master assigned tasks and thus support and relieve people in their everyday lives. Hollie is being developed as part of the FZI House of Living Labs in Karlsruhe and performs various support, assistance, and service tasks.
Manufacturer-independent
FZI in-house construction without third-party specifications
Flexible equipment
Sensor and actuator
equipment customized for
use and application
Open source
ROS 2 as the basis for flexible control and application
Biologically inspired
As a humanoid robot modeled on humans
With its research focus Applied Artificial Intelligence, the FZI is a scientific leader in the research of interactive diagnostic and service systems and contributes to their implementation in beneficial, tailor-made solutions for industry and society.
Fields of application
Support for nursing staff
HoLLiE is currently being used primarily to support nursing staff. As part of the HoLLiECares project, the robot was further developed for use in care environments and tested in hospitals. This involved pushing wheelchairs, sorting medication, walking assistance, etc.
Support in everyday life
As a service robot, HoLLiE can recognize its environment and react to it to support people. Its cameras can recognize objects and interact with them using its hands (5-finger gripper). This enables it to help with tidying up, for example.
Assistance & entertainment
As a humanoid service robot, HoLLiE can take on many tasks in a human-centered environment that are otherwise reserved for humans. This includes, for example, decorating cookies and mixing cocktails.
The complex in-house development of the HoLLiE service and assistance robot demonstrates the extensive expertise of the FZI Research Center for Information Technology in prototype development and the use of mobile robotics.
Contact

Georg Heppner
Department Manager
Division: Intelligent Systems and Production Engineering
- +49 721 9654-248
- heppner@fzi.de
- Headquarters Karlsruhe
About the FZI
As an independent research institution, the FZI Research Center for Information Technology supports you in finding a solution for your specific requirements. We offer
- robust, modern robot platforms
- extensive knowledge of robotics software frameworks
- contract research, prototype development, or exchange of experience
- feasibility studies, pilot applications, and evaluation in practice
- training and further education
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}