i-SAMLR
Interactive, independent learning for autonomous mobile walking robots
Start: 01/2023
End: 12/2025
The i-SAMLR (interactive, autonomous learning for autonomous mobile walking robots) project developed software for an autonomous mobile walking robot designed for use in highly dynamic, constantly changing environments. The aim was to help overcome the previously limited autonomy of mobile robots in the "real" world, especially when dealing with unknown objects and environments. The walking robot can now learn new objects interactively and with minimal user intervention—without complex training processes. The methods developed were evaluated in a practical scenario on a large construction site and supplemented with adapted concepts for human-robot interaction and operation.
The central problem and thus the focus of the project was the limited autonomy of existing robotics solutions outside of controlled factory halls. Robots quickly reach their limits in unfamiliar environments and when encountering new objects. Especially on construction sites or in similarly dynamic fields of application, environments, and robot tasks are constantly changing. For example, it cannot always take the same routes, as new obstacles arise spontaneously. The objects relevant to any tasks are also usually only known at short notice.
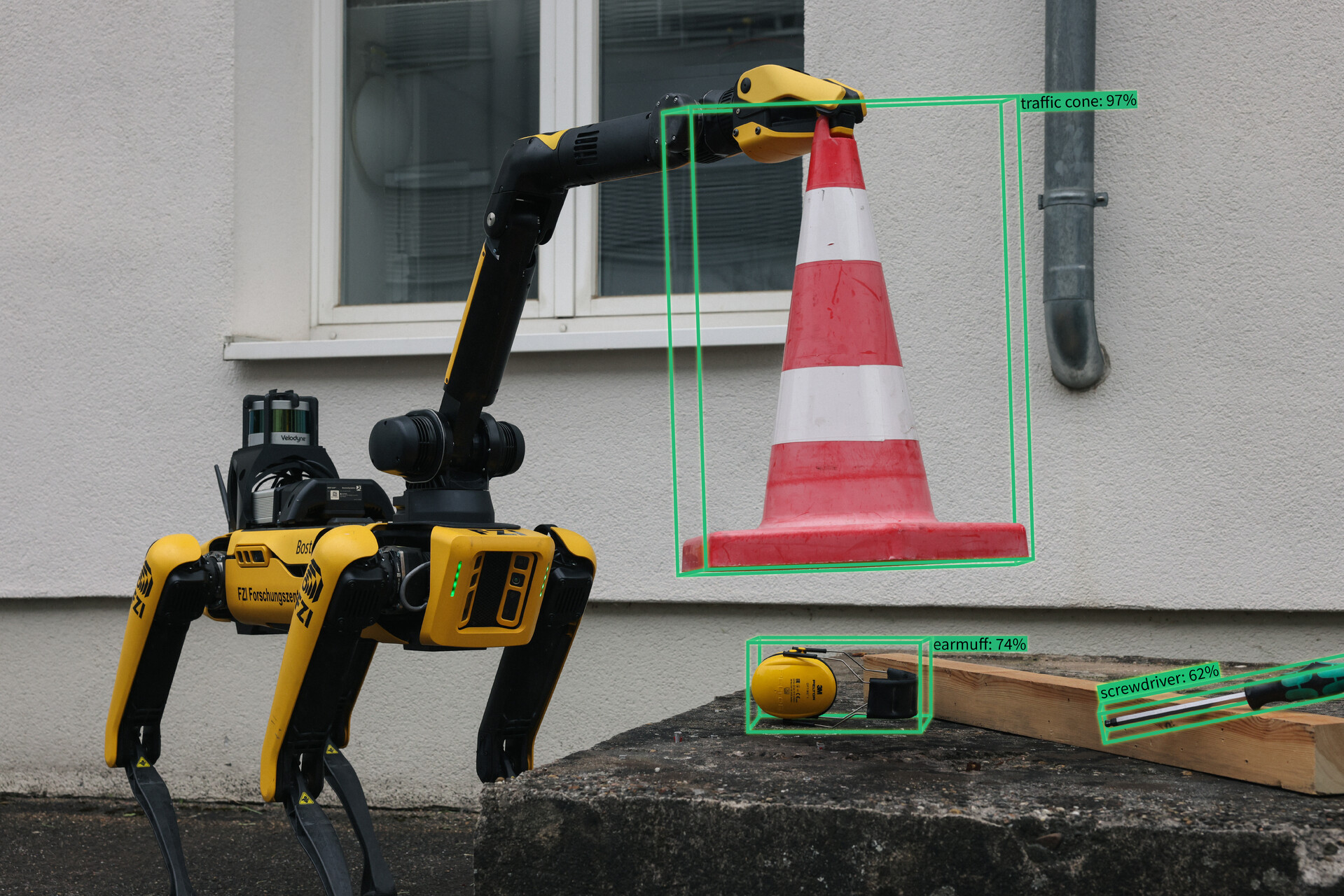
Specifically, the project delivered a prototype autonomous walking robot with a gripper arm that can independently perform pick-up and delivery services on construction sites. In addition, new AI methods enable the robot to learn interactively about unfamiliar objects alongside humans. Intuitive operating concepts, such as voice commands or a touch interface on a tablet, supplemented this. To test everything in the real world, several tests were conducted on large construction sites in collaboration with the Weisenburger company.
The FZI used modern methods from AI, explainable AI, robotics, sensor technology, and human-robot interfaces to solve the research questions. The AI architectures developed were published at specialist conferences (see links below).
As this project was contract research, the FZI was involved in all aspects from project management to implementation. The walking robot developed is based on a Spot platform available at the FZI and can therefore move safely, grasp objects, and also transport them. Objects can be "learned" directly on site using the software solution developed by FZI—without complex programming or lengthy AI training in advance, making operation and use possible even for laypeople.