Flexibler Serviceroboter für den Einsatz in menschenzentrierten Umgebungen
HoLLiE
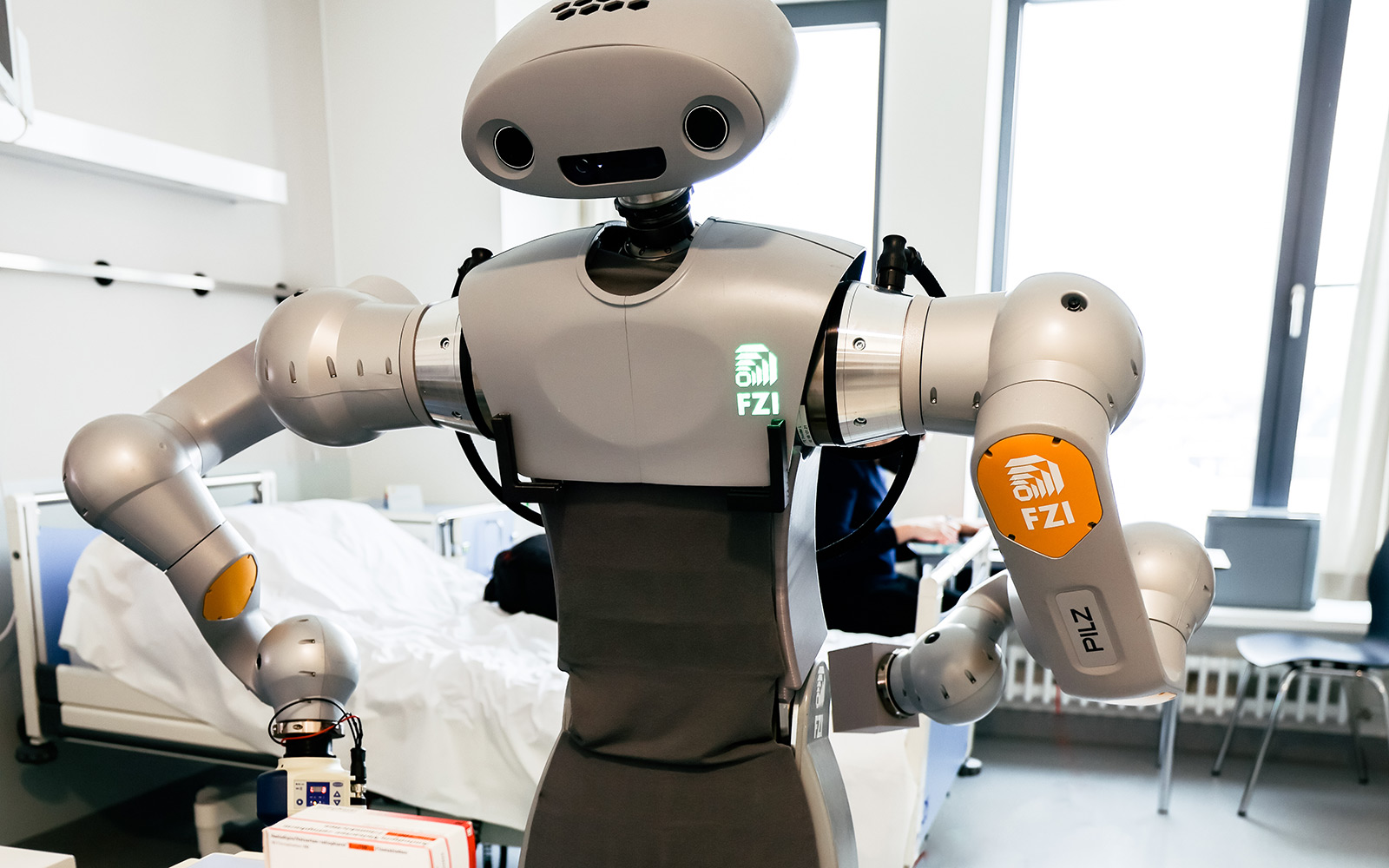
HoLLiE („House of Living Labs intelligent Escort“) ist ein modularer Serviceroboter mit zwei Armen und einer mobilen Plattform sowie einer Vielzahl an Sensoren. Durch die Kombination von
robusten, industrienahen Komponenten mit flexiblen Softwaresystemen zur Umwelterfassung und
Robotersteuerung kann HoLLiE schnell und zuverlässig zugewiesene Aufgaben meistern und so
den Menschen im Alltag unterstützen und entlasten. HoLLiE wird als Teil des FZI House of Living
Labs in Karlsruhe entwickelt und übernimmt verschiedene Begleit-, Assistenz- und
Serviceaufgaben.
Herstellerunabhängig
FZI-Eigenbau ohne
Vorgaben durch Dritte
Flexibel ausgestattet
Sensor- und Aktor-
Ausstattung individuell für
Einsatz und Anwendung
Open Source
ROS 2 als Grundlage für flexible Steuerung und Anwendung
BIologisch inspiriert
Als Humanoider Roboter nach Vorbild des Menschen
Mit dem Forschungsschwerpunkt Applied Artificial Intelligence ist das FZI wissenschaftlich führend in der Erforschung interaktiver Diagnose- und Servicesysteme und trägt zu deren Umsetzung in nutzbringende und passgenaue Lösungen für die Industrie und Gesellschaft bei.
Einsatzfelder
Unterstützung von Pflegekräften
Aktuell ist HoLLiE vor allem für die Unterstützung von Pflegekräften im Einsatz.
Dafür wurde der Roboter im Rahmen des Projektes HoLLiECares für den Einsatz in Pflegeumgebungen weiterentwickelt und im Krankenhaus getestet. Dabei ging es um das Schieben von Rollstühlen, Sortierung von Medikamenten, Gehbegleitung u.a.
Unterstützung im Alltag
Als Serviceroboter kann HoLLiE ihre Umgebung erkennen und darauf reagieren, um den Menschen zu unterstützen. Mit ihren Kameras kann sie Objekte erkennen
und mit ihren Händen (5-Finger- Greifer) mit diesen interagieren. Dadurch kann sie zum Beispiel beim Aufräumen unterstützen.
Assistenz & Entertainment
Als humanoider Serviceroboter kann HoLLiE viele Aufgaben in einer menschzentrierten
Umgebung übernehmen, die sonst nur Menschen vorbehalten sind. Dazu gehört beispielsweise das Dekorieren von Keksen und das Mixen von Cocktails.
Die komplexe Eigenentwicklung des Service- und Assistenzroboters HoLLiE zeigt das umfangreiche Know-how des FZI Forschungszentrum Informatik in der Prototypenentwicklung und Nutzung von Laufrobotik.
Ansprechperson

Georg Heppner
Abteilungsleiter
Bereich: Intelligent Systems and Production Engineering
- +49 721 9654-248
- heppner@fzi.de
- Hauptsitz Karlsruhe
Informationen zum FZI
Als unabhängige Forschungseinrichtung unterstützt das FZI Forschungszentrum Informatik Sie bei der Lösung Ihrer Problemstellungen. Wir bieten
- robuste, moderne Roboterplattformen
- umfangreiche Kenntnisse zu Robotik-Software-Frameworks
- Auftragsforschung, Prototypenentwicklung oder Erfahrungsaustausch
- Machbarkeitsstudien, Pilotanwendungen und Evaluation in der Praxis
- Schulungen und Fortbildungen
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}