i-SAMLR
Interaktives, selbstständiges Lernen für autonome mobile Laufroboter
Start: 01.2023
Ende: 12.2025
Im Projekt i-SAMLR (interaktives, Selbstständiges Lernen für Autonome Mobile Lauf-Roboter) wurde Software für einen autonomen mobilen Laufroboter entwickelt, der für den Einsatz in hochdynamischen, sich ständig verändernden Umgebungen ausgelegt ist. Ziel war es dazu beizutragen, die bislang eingeschränkte Autonomie mobiler Roboter in der „echten“ Welt zu überwinden, insbesondere im Umgang mit unbekannten Objekten und Umgebungen. Der Laufroboter kann nun neue Gegenstände interaktiv und mit minimalem Eingriff durch Nutzende erlernen – ohne aufwendige Trainingsprozesse. Die entwickelten Methoden wurden in einem praxisnahen Szenario auf einer Großbaustelle evaluiert und durch angepasste Konzepte zur Mensch-Roboter-Interaktion und zur Bedienung ergänzt.
Das zentrale Problem und damit der Fokus des Projekts war die bislang eingeschränkte Autonomie bereits bestehender Robotiklösungen außerhalb kontrollierter Fabrikhallen. In unbekannten Umgebungen und mit neuen Objekten kommen Roboter schnell an ihre Grenzen. Gerade auf Baustellen oder in ähnlich dynamischen Einsatzfeldern ändern sich Umgebungen und die Aufgaben des Roboters stetig. So kann er beispielsweise nicht immer die gleichen Wege nehmen, da spontan neue Hindernisse auftauchen. Auch die relevanten Objekte für etwaige Aufgaben sind meist erst kurzfristig bekannt.
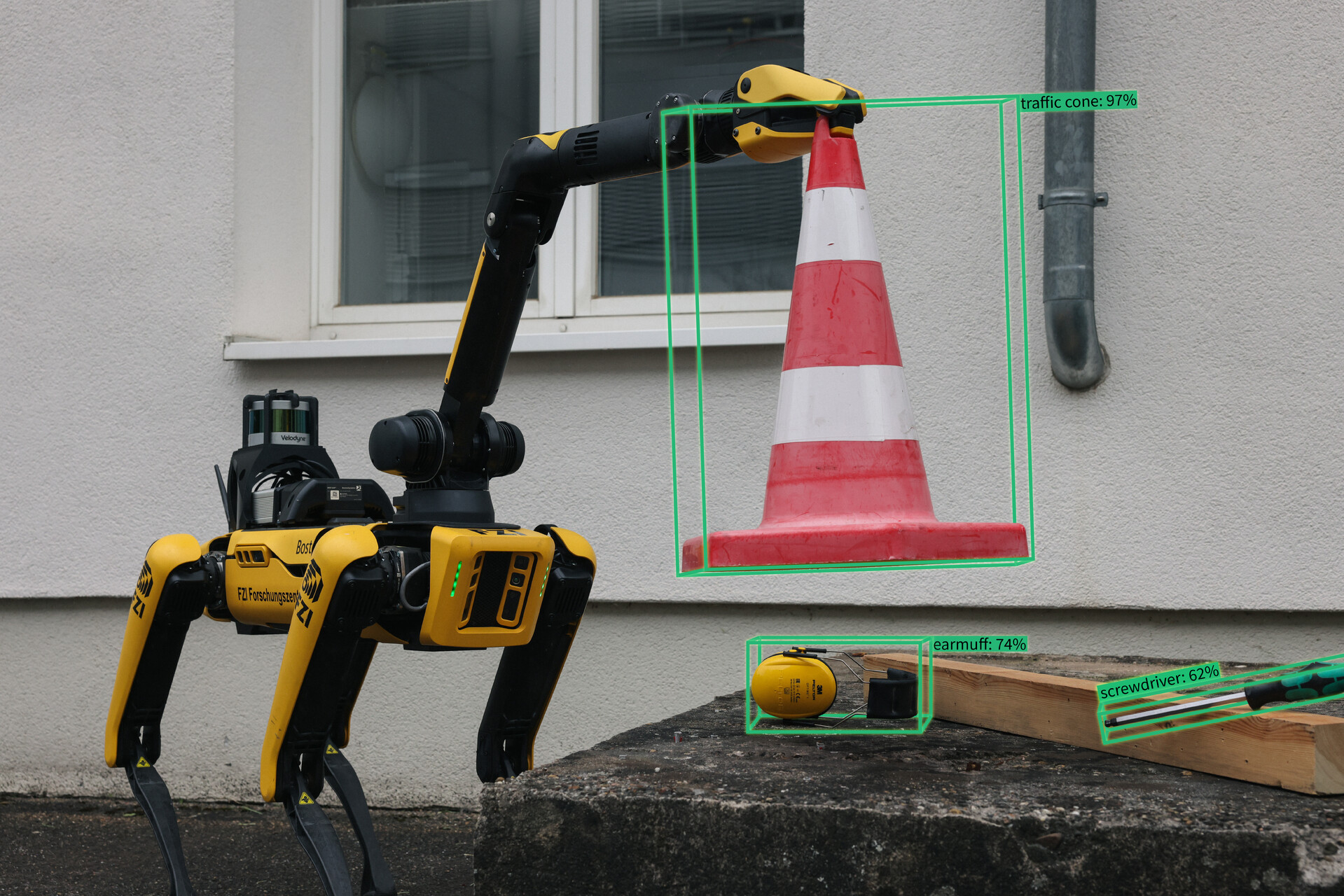
Konkret lieferte das Projekt für diese Herausforderungen einen prototypischen autonomen Laufroboter mit Greifarm, der Hol- und Bringdienste auf Baustellen selbstständig ausführen kann. Zudem wurden neue KI-Verfahren entwickelt, mit denen der Roboter für ihn unbekannte Objekte interaktiv gemeinsam mit dem Menschen erlernt. Ergänzt wurde dies durch intuitive Bedienkonzepte, etwa durch mündliche Sprachbefehle oder per Touch-Oberfläche am Tablet. Um alles auch in der realen Welt zu testen, wurden in Zusammenarbeit mit der Firma Weisenburger mehrere Tests auf Großbaustellen durchgeführt.
Zur Lösung der Forschungsfragen kamen moderne Methoden aus KI, erklärbarer KI, Robotik, Sensorik sowie Mensch-Roboter-Schnittstellen zum Einsatz. Die entwickelten KI-Architekturen wurden auf Fachkonferenzen veröffentlicht (Links siehe unten).
Da es sich bei diesem Projekt um Auftragsforschung handelte, war das FZI in alle Aspekte von Projektleitung bis Umsetzung involviert. Der entwickelte Laufroboter baut auf einer am FZI vorhandenen Spot-Plattform auf und kann sich dementsprechend sicher bewegen, Gegenstände greifen und auch transportieren. Objekte können mit der durch das FZI entwickelten Software-Lösung direkt vor Ort „erlernt“ werden – ohne aufwendige Programmierung oder langes KI-Training im Vorfeld, sodass die Bedienung und Nutzung auch für Laien möglich werden.